
 产品:428
产品:428

首先打开RobotStdio仿真软件
步骤1、选择工作站和机器人控制器解决方案
步奏2、选择从备份创建
步骤3、选择要恢复的程序备份文件,备份文件放在英文文件目录下,勾选还原备份
步骤4、点击创建

步骤5、等待系统启动完成后显示绿色即可进行程序编辑、参数配置、仿真模拟等动作
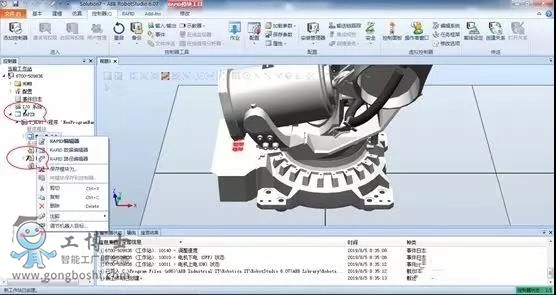
步骤6、系统创建完成后打开点击控制器
步骤7、若只对机器人程序进行编辑,在程序编辑完后可单独将任务或者程序模块导出,加载到真实机器人中
步骤8、若只对配置参数进行修改,可通过保存参数将配置参数导出
步骤9、选择需要导出的参数类型,将配置参数加载到真实机器人中

步骤10、若对程序和配置改动较多,可直接在虚拟控制器中创建备份,将备份恢复至真实机器人中
注:
下图中是离线编程界面中常用功能介绍

A、配置=示教器中控制面板→配置
B、输入输出监控及仿真=示教器中输入输出
C、RAPID程序=示教器中程序编辑器
D、示教器可以打开虚拟示教器
E、机器人手/自动钥匙及自动使能上电按钮
F、手动使能上电按钮
想了解更多ABB产品及技术请点击:ABB机器人配件
- 下一篇:ABB机器人编码器如何选型
- 上一篇:ABB机器人套接口通信